
Battery
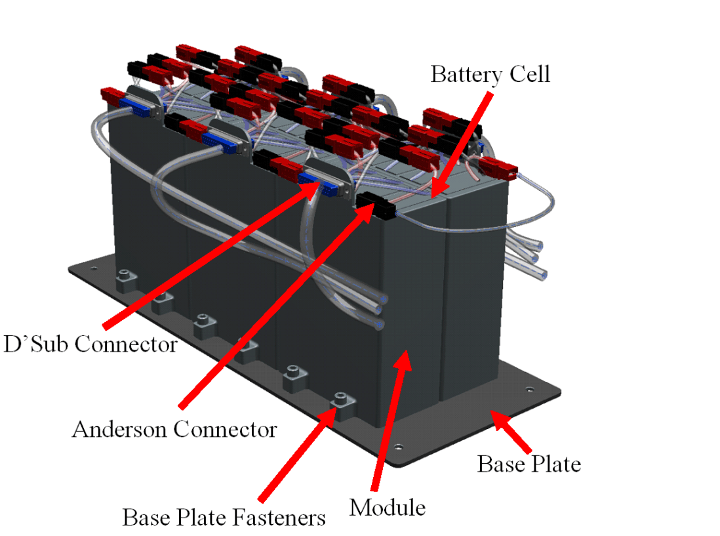
- The high voltage battery systems will be made out of six individual 44 V modules to facilitate testing and to ensure safety. The battery will use an Orion BMS to balance the cells, monitor the current output and temperature of the cells. The battery system will be enclosed in a pressure vessel to dissipate more heat from the batteries, as well as prevent venting of the cells. All battery cells will be wired in series to prevent issues that may arise from wiring cells in parallel through the voltage taps or from a series-parallel configuration, where a large voltage difference could be developed between the series strings.